Physical Dimensions and Electrical Index |
Voltage | 12-36VDC |
Power Consumption | ≤12W(Steady State) |
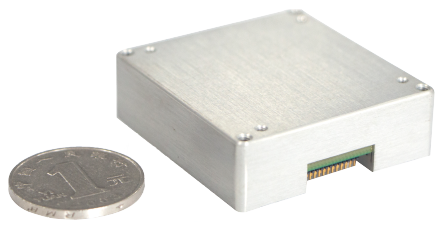
Size | 92mm×92mm×90mm |
Weight | ≤1.0kg |
Environmental Index |
Working Temperature | -40℃~+60℃ |
Storage Temperature | -45℃~+70℃ |
Vibration | 5~2000Hz,6.06g(with shock absorbers) |
Shock | 30g,11ms(with shock absorbers) |
MTBF | >15 years |
Continuous Working Time | >24h |
Interface Features |
RS422×2(Can be configured asRS232) |
RS232×3(1 way inertial navigation configuration, 2 way directly connected to satellite navigation board) |
PPS×1(Compatible with differential and TTL/LVTTL) |
Ethernet×1 |
CAN×2 |
Output synchronization x 1 (LVTTL and TTL compatible and configurable) |
Input DI × 1 (compatible with 32V, capable of external odometer pulse) |
EVENT input x 1 (LVTTL signal) |
System Performance Index |
| Test conditions | Index |
Position Accuracy | GNSS Valid,Single Point | 1.5m(RMS) |
GNSS Valid,RTK | 2cm+1ppm(RMS) |
Pure Inertial Horizontal Position Maintenance | 80m/5min(CEP) |
500m/10min(CEP) |
1.5nm/30min(CEP) |
Airspeed Combination Horizontal Position Maintenance | 0.8m/30min(CEP) |
Heading Accuracy | Single Antenna | 0.1°(RMS) |
Dual Antenna | 0.2°/L(L is the baseline length)(RMS) |
Heading Maintenance | 0.2°/30min(RMS) 0.5°/h(RMS) |
Self North-seeking Accuracy | 0.2°SecL, dual position alignment 15min |
1.0°SecL, single position alignment 5-10min |
Attitude Accuracy | GNSS Valid | 0.02°(RMS) |
Attitude Maintenance(GNSS Invalid) | 0.2°/30min(RMS), 0.5°/h(RMS) |
Velocity Accuracy | GNSS Valid, Single Point L1/L2 | 0.1m/s(RMS) |
IMU Performance Index |
FOG Gyro | Range | ±400°/s |
Bias Stability | ≤0.3°/h |
MEMS Accelerometer | Range | ±16g |
Bias Stability | ≤100μg |